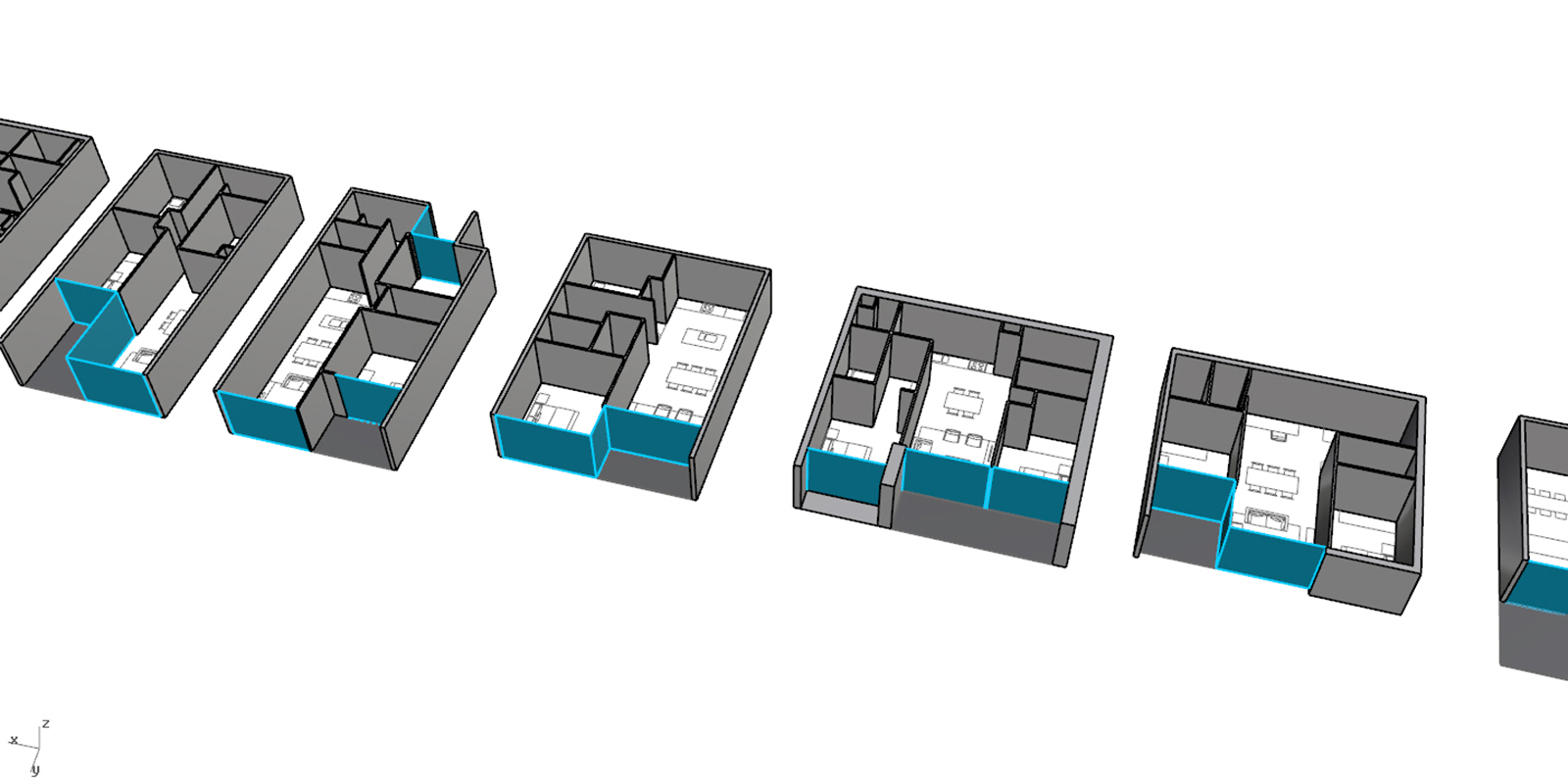
As part of the build-up to the RoblArch 2016 conference, I was invited to take part as industry representatives in a research elective at The University of Sydney (USYD) called ‘Code to Production’. Code to Production explored the potential of an iterative design process from parametric variations; to analysis and simulation; to digital prototyping and manufacturing. The course had a two-fold agenda: to examine the performance of complex geometries available through sophisticated computational design processes and to translate the optimised design by digital manufacturing into robotic experimentation and prototyping.
Based upon the development of a series of controlled variations derived through parametric and scripting methods, the elective aimed to further expand an understanding of geometry and architectural performance between informed by robots, materials and sensors. It reviewed an open system of design research in which design process, computational modelling and robotic fabrication were deployed in a test series and lab scenario to derive approaches and detailed fabrication knowledge for architectural practice.
During this course we were all trained in how to operate a KUKA robotic arm, how to script tool paths using the KUKA|PRC plug-in for Grasshopper, as well as how to integrate sensor feedback, including 3D scanning, live video feeds, light, temperature and pressure, into our workflows. We used this knowledge to run a series of quick design experiments exploring the material properties of expanding insulating foam.

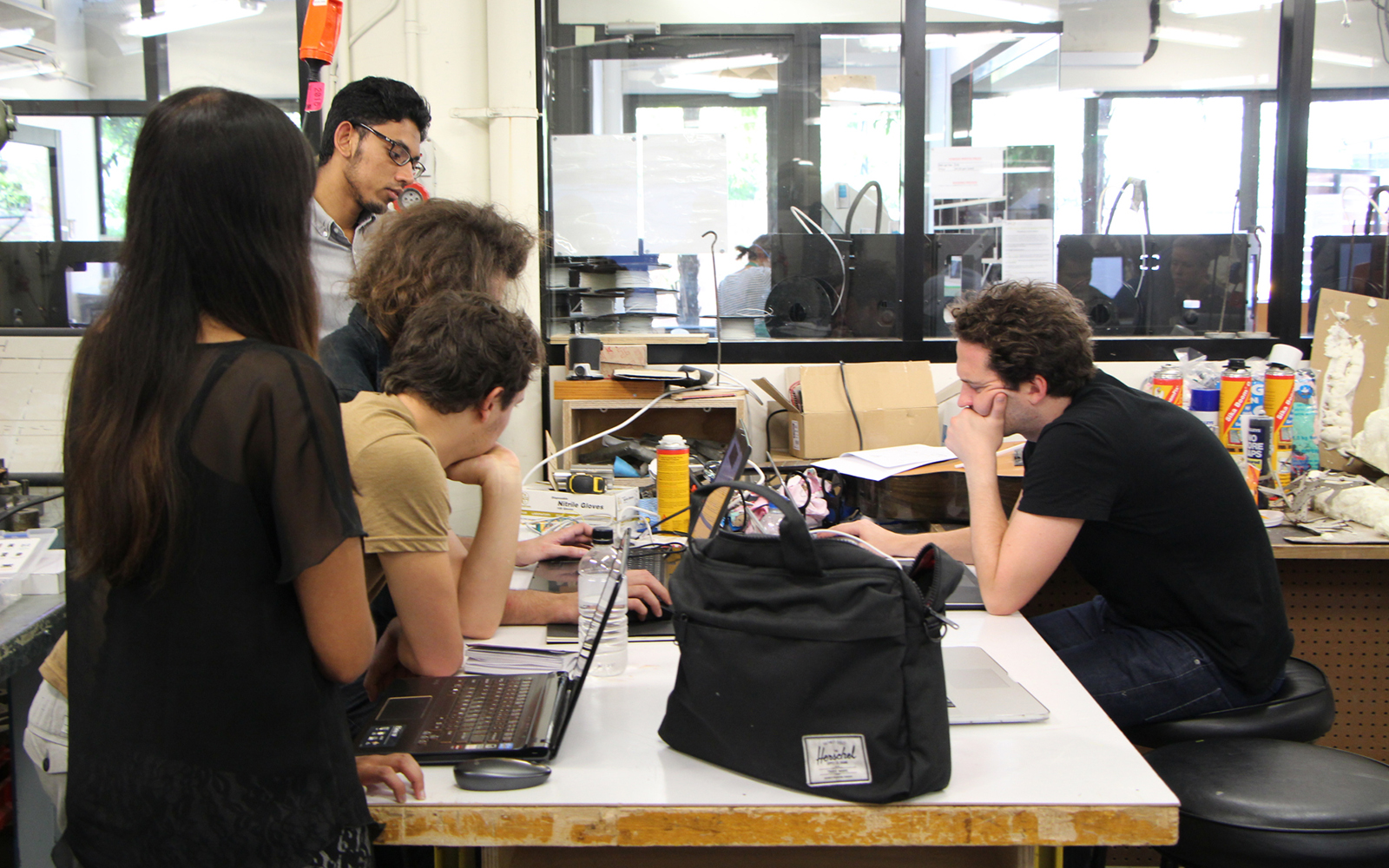

This course was co-ordinated by Dr Dagmar Reinhardt with visiting guests, Alexandre Dubor, Guillem Camprodon and Gabrielle Bello Diaz from IAAC. The team was also supported by the fantastic staff at DMAF Lab: Marjo Niemela, Dylan Wozniak-O’Connor, Rodney Watt, Samantha Horlyck, Susana Alarcon Licona, and Kate Dunn.