As part of the ROB|ARCH 2016 conference, I had the pleasure to attend the ‘Robotic sewing of custom timber veneer laminates’ workshop. The workshop was run by Oliver Krieg and Tobias Schwinn from the Institute for Computational Design (ICD), and was in collaboration with Tim Schork, Jackson Caish-Sadlek and Jon McCormack from RAW & sensiLab, Monash University.
Position
Recent developments in computational design and computer-controlled fabrication have significantly expanded the range of applications for timber in architecture. Although modern timber fabrication technology allows the material to be shaped into a variety of shapes, products and dimensions, the inherent material characteristics of timber are mostly neglected or even suppressed in the design and fabrication process. Yet, timber exhibits excellent mechanical behaviour and high potentials for textile and multi-material connections outside the scope of conventional timber connections.
This workshop explores an alternative approach and will investigate the architectural potentials of robotic sewing of bespoke timber veneer laminates in combination with elastic bending. Strips of timber veneer will be laminated to achieve defined bending behaviours, and will be sewn together using a robotic sewing effector resulting in stiff, but ultra-lightweight building modules. The fabrication process will be enabled by bespoke computational design tools and methods that the participants will engage with during the workshop.

After an initial introduction, material tests were undertaken on standard sewing machines. Using thin timber veneer strips, various stitching patterns and techniques were explored.

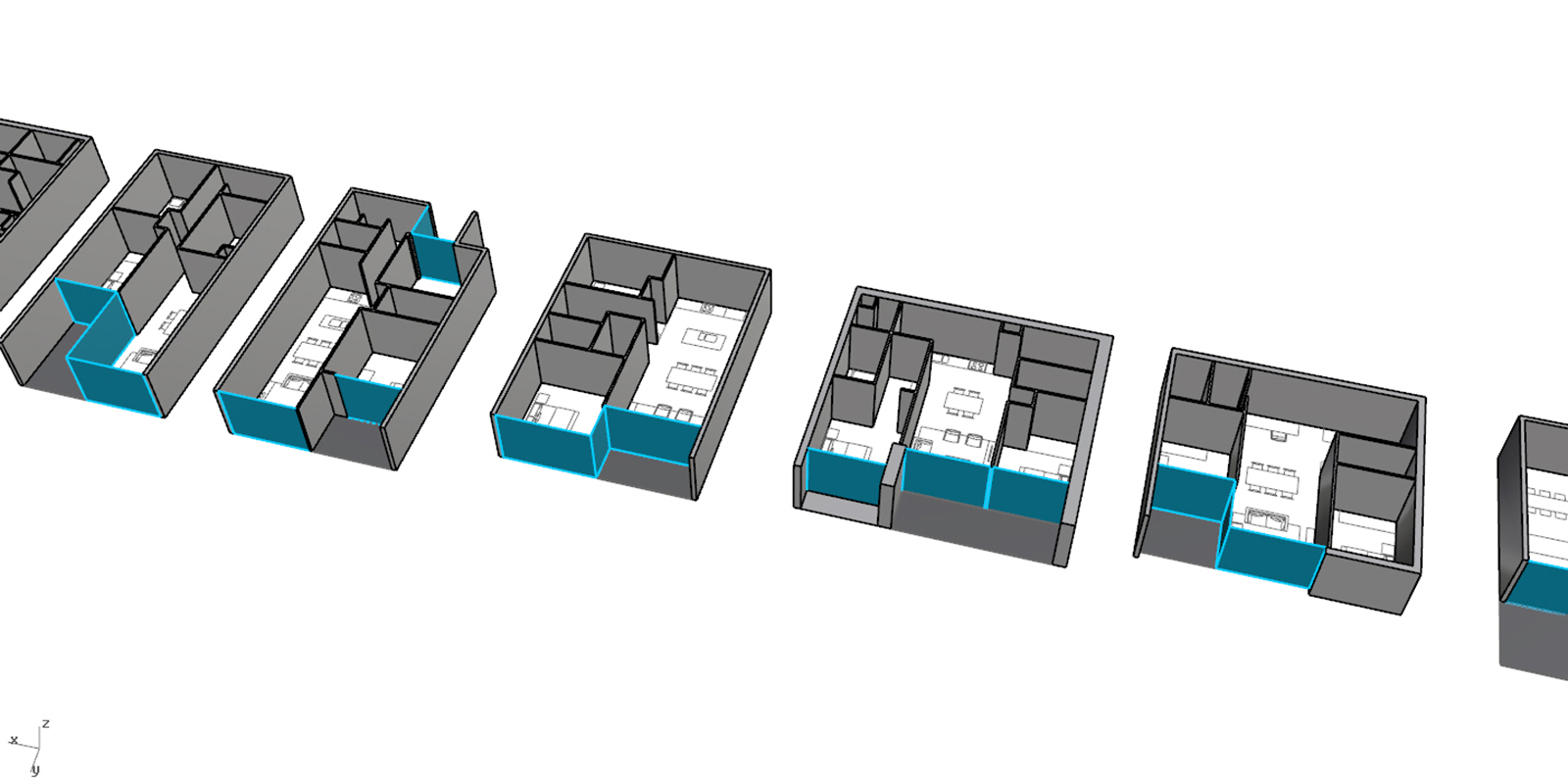
We then tested the provided Grasshopper design script. Using a base surface as an input, the script panelised the surface using standarised pieces, 250mm wide x 950mm long. The stitching pattern, curvature and panel offset were all associatively generated. The design was a simple double curved surface which would stand vertically.

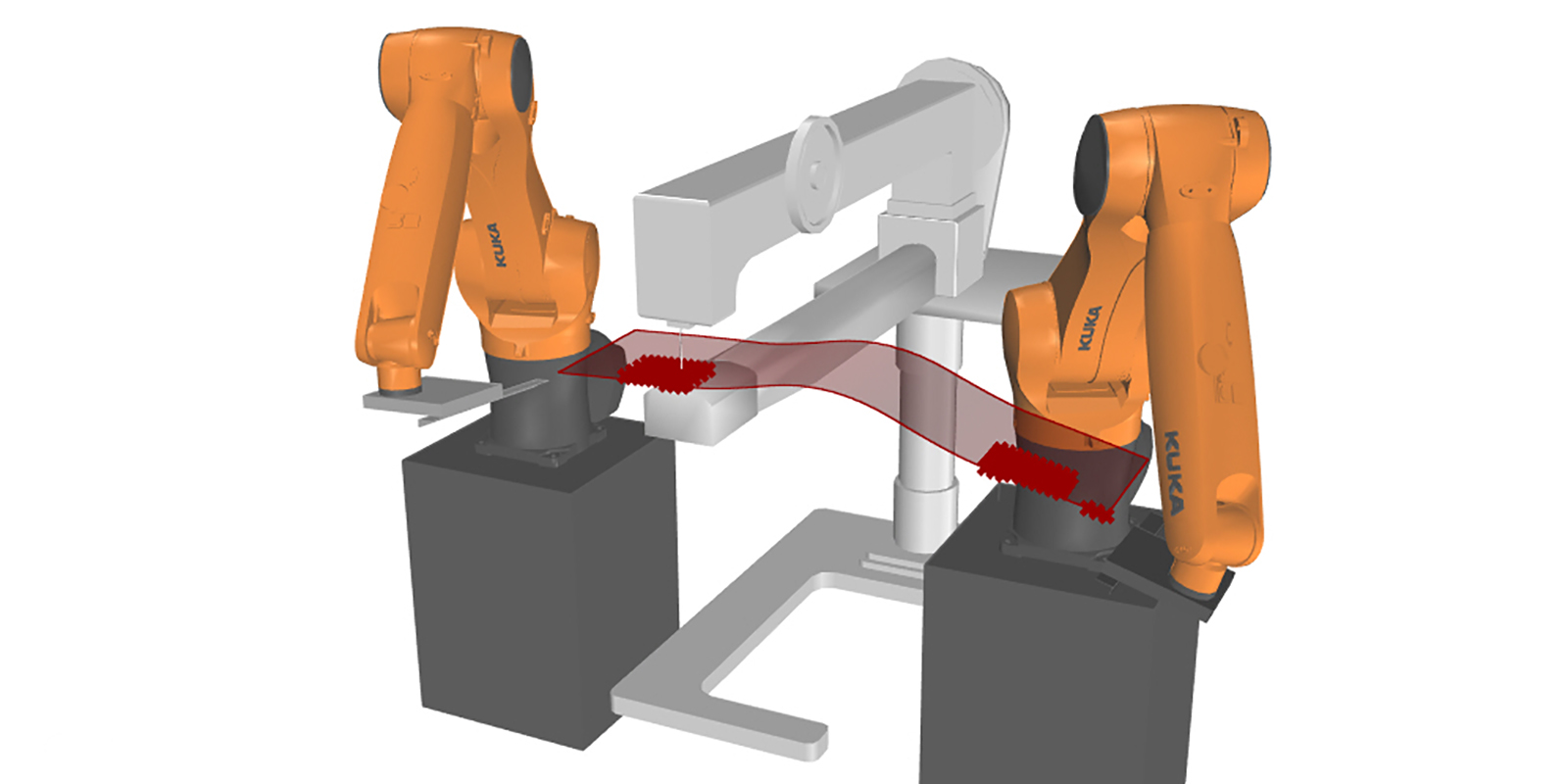
Next, we virtually simulated the robot using VirtualRobot, ICD’s own Grasshopper plug-in, to ensure there were no self-collisions or singularities. Once satisfied, we could then generated the KUKA Robot Language (KRL) code. Unique KRL code was required for each individual piece.
The KRL code was then modified to include a sub routine called ‘Stitch()’ and ‘Pause()’ at various key moments in the process. The Stitch() function activated the Arduino board, sending a signal to the sewing machine’s controller to perform one full stitch. The Chinese manufactured sewing machine was produced by ‘Hightex’ and is typically used in industrial applications such as horse saddle stitching.
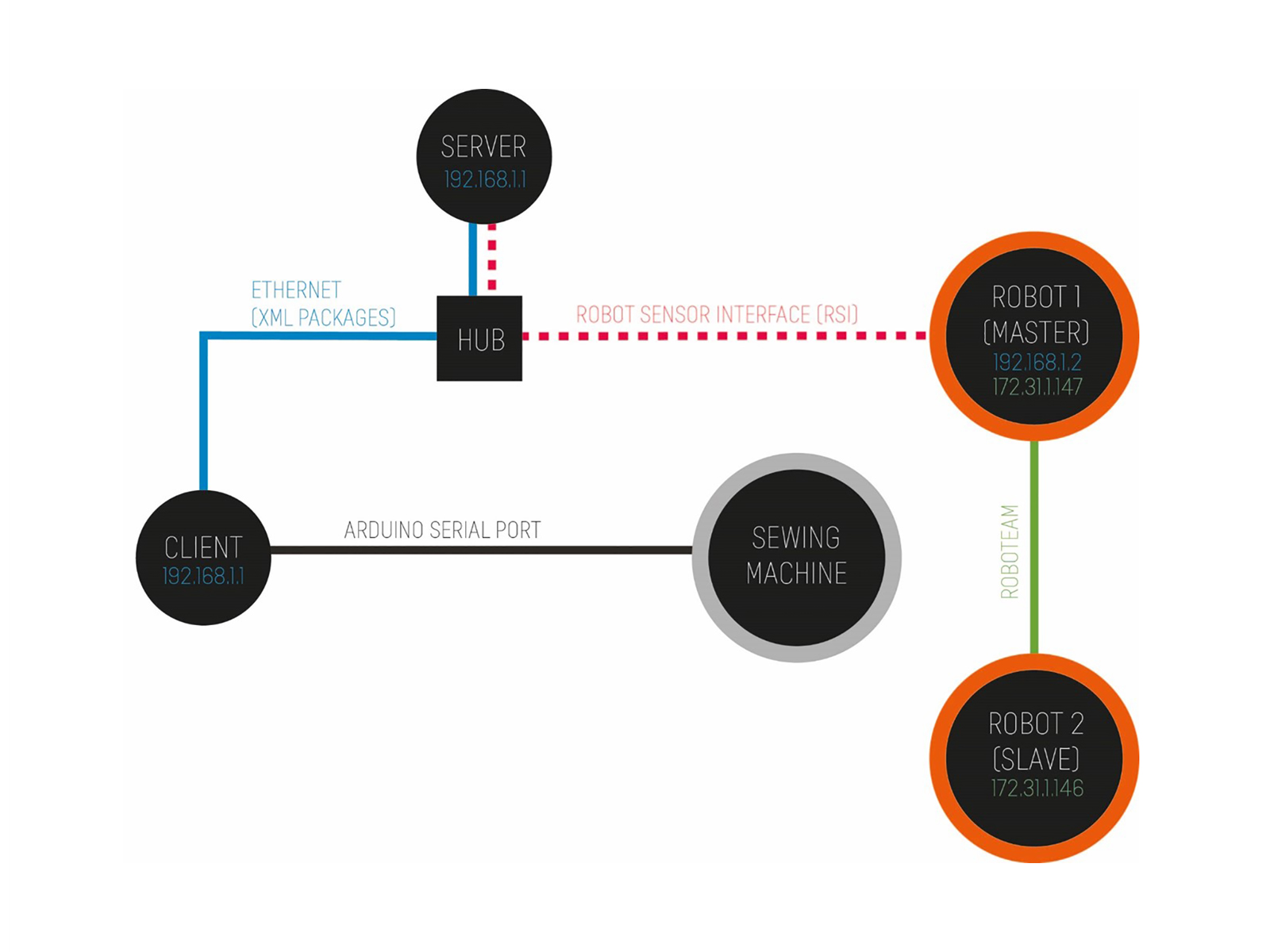
The timber veneer panels were them manually attached and aligned via hand clamps to the end effectors of 2no. KUKA KR10 robots. For the first piece of the column, stitching was undertaken to mark the location and alignment of the adjacent piece. Once completed, the timber veneer was removed, the robots reset, and the new KRL code loaded. The robots then moved into the next position and were re-coupled with Kuka.RoboTeam. The RoboTeam application enables a ‘master and slave’ setup, which allows synchronization of path motions for up to 4 robots. This process was then repeated for the remaining pieces in the column.

Due to the imprecise nature of the workflow, the team utilised the KUKA.RoboticSensorInterface (RSI). This makes it possible to influence the robot’s motion ‘on-the-run’ by manually adjust its position. This was done via a series of Boolean Buttons in Grasshopper, one for each direction – up, down, forward, backward. There was also a button to stich in case the automatic stich function failed.
Due to the limitations of the robotic setup, columns were joined manually using standard mechanical fixings. The end results was a small installation which demonstrated the possibility of stiching to achieve a double curvature surface through regular, timber veneer panels.