
This paper, titled ‘Architectural fitness: Towards a morphogenesis of multi-dwelling housing’, was submitted as part of the ACADIA conference, ‘Computational Ecologies: Design in the Anthropocene’.
Abstract
Fueled by the recent surge in Chinese investment, Australia is currently undergoing an enormous housing boom. Architects across the nation are inundated with residential projects, particularly multi-dwelling housing. This paper looks at innovative and novel ways to deal with this crisis through the generation of a semi-automated digital design tool to test the feasibility of projects.
Residential projects are very prescriptive in their constraints. Numerous metrics must be achieved in order to satisfy both planning controls and the client’s commercial interests. Key metrics such as Gross Floor Area, Net Sellable Area and apartment mix ratios are all vital in ensuring a project’s viability. The combination of these parameters culminate in the design’s ‘fitness’. This research presents a methodology by which these values can be sorted, combined and reworked into a single architectural fitness value. It will be argued that through this process, new housing models can emerge which have a higher performance and can be designed in significantly less time.
Introduction
Within architecture, the term ‘fitness’ is often associated with genetic algorithms. The origins of this can be traced to the early 1990s when the ecologist Thomas Ray of the Sante Fe Institute created a software program to study biological evolution. Called TIERRA, the program introduced the notion of a genetic algorithm which could simulate ‘the behavior and adaption of a population of candidate solutions over time as generations are created, tested, and selected through repetitive mating and mutation’[1]. To date, most genetic algorithms have been used mainly for search and optimization problems such as devising strategies to win at checkers[2]. In such circumstances, fitness is clearly defined. But if architects are to implement genetic algorithms into their design process, how does one define architectural fitness? Architecture is complex and must address multiple criterions. How can these criterions be combined, as they must be, to give a single composite fitness score?
Residential projects are very prescriptive in their constraints. Numerous metrics must be achieved in order to satisfy both planning controls and the client’s commercial interests. Planning authorities are concerned with the macro: setbacks, height restrictions, site coverage and the Floor Space Ratio (FSR). These parameters can be considered morphodynamic as they are external influences which will affect the building. Conversely, clients are often concerned with maximizing the Net Sellable Area (NSA) and building efficiency, ensuring that apartment mix ratios are met based on their business plan, and that apartment layouts are sellable. These parameters can be considered morphogenetic as they are internal influences that can be controlled. All of these parameters are vital in ensuring a project’s viability.
The work presented in this paper attempts to combine both morphodynamic and morphogenetic criterions, into a single, unified, architectural methodology. To test this approach, a digital design tool was developed using Grasshopper to semi-automate the feasibility stage of residential projects.
Site and building constraints
The script initially prioritizes the morphodynamic over the morphogenetic as often failure to comply with these constraints will result in the project not gaining planning approval. The script begins with basic site metrics to generate the area and preliminary maximum allowed GFA.
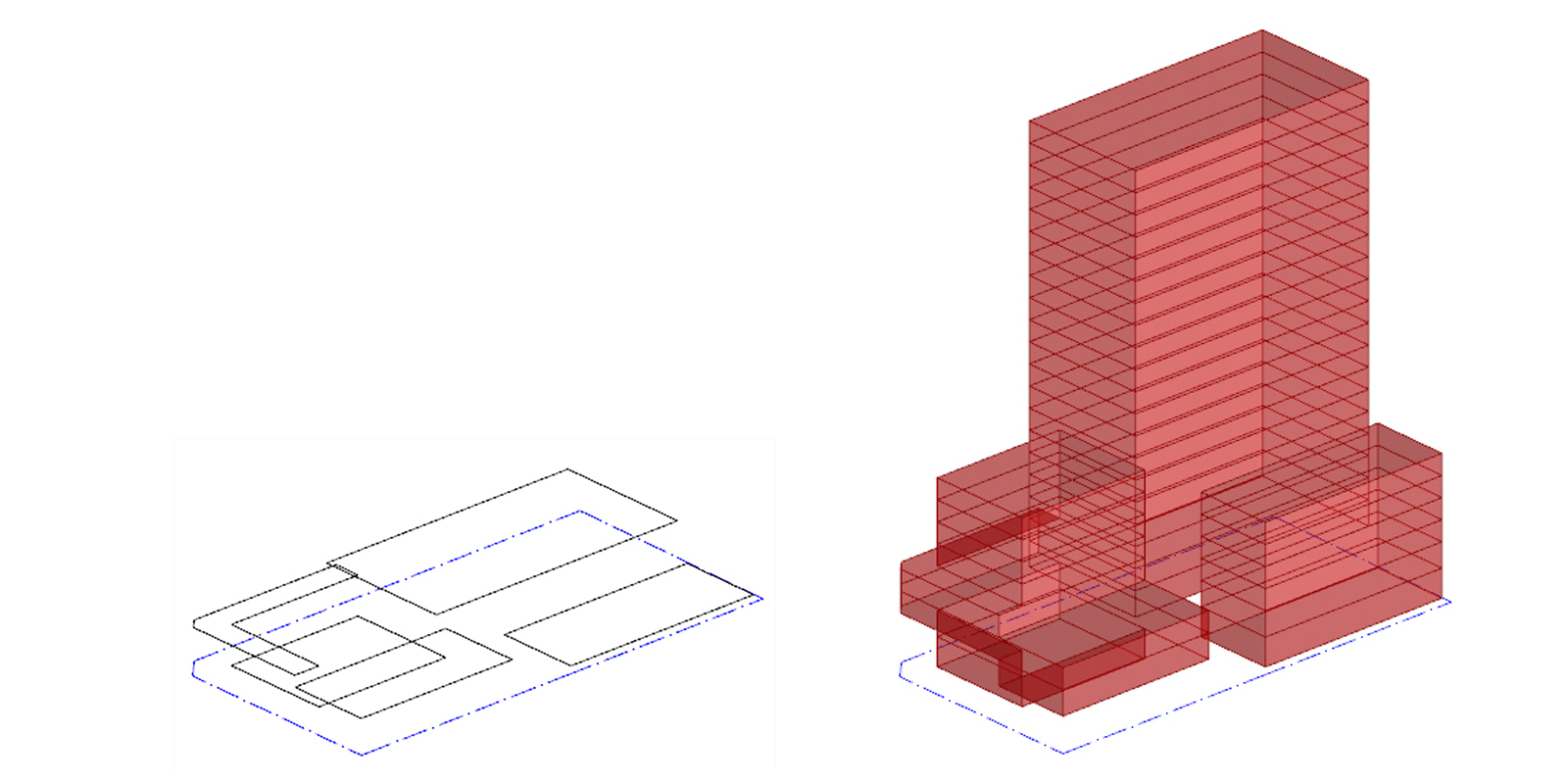

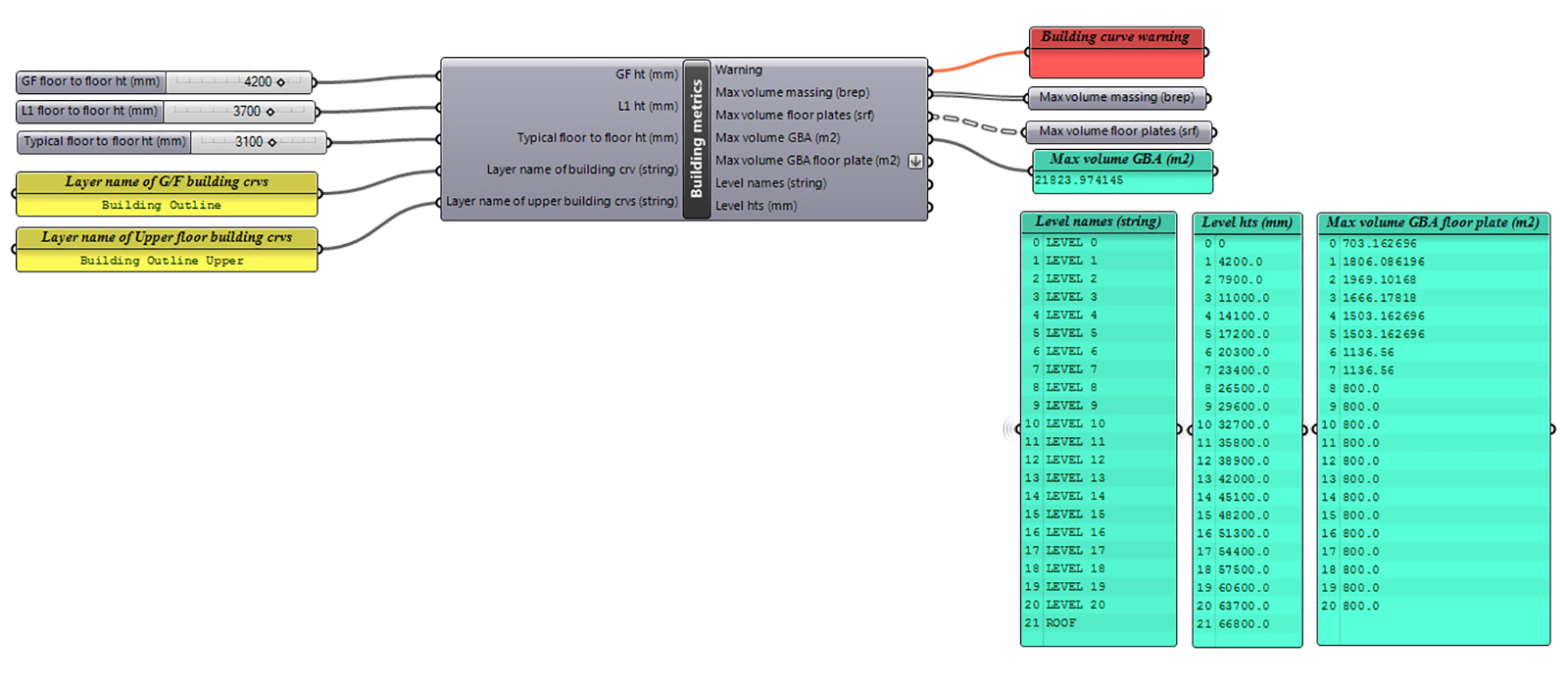
Using these metrics, it is possible to derive the maximum building volume typically prescribed by the planning authorities. Several inputs are required from the user including: the floor-to-floor heights and layer name the proposed building outline. Rather than manually referencing Rhino geometry, the Elefront plug-in is utilized to automate the referencing process. The Rhino geometry is named within the Rhino properties pallet which represents the number of floors the closed polycurve is to be extruded. The script uses this value to calculate the correct height to extrude the curve to create the massing. This functionality allows users to easily manipulate geometry without having to be concerned with the exact coordinates of an element. The script returns the maximum building volume massing and floor plates, maximum allowed GBA, level names and level heights.
Initial feasibility
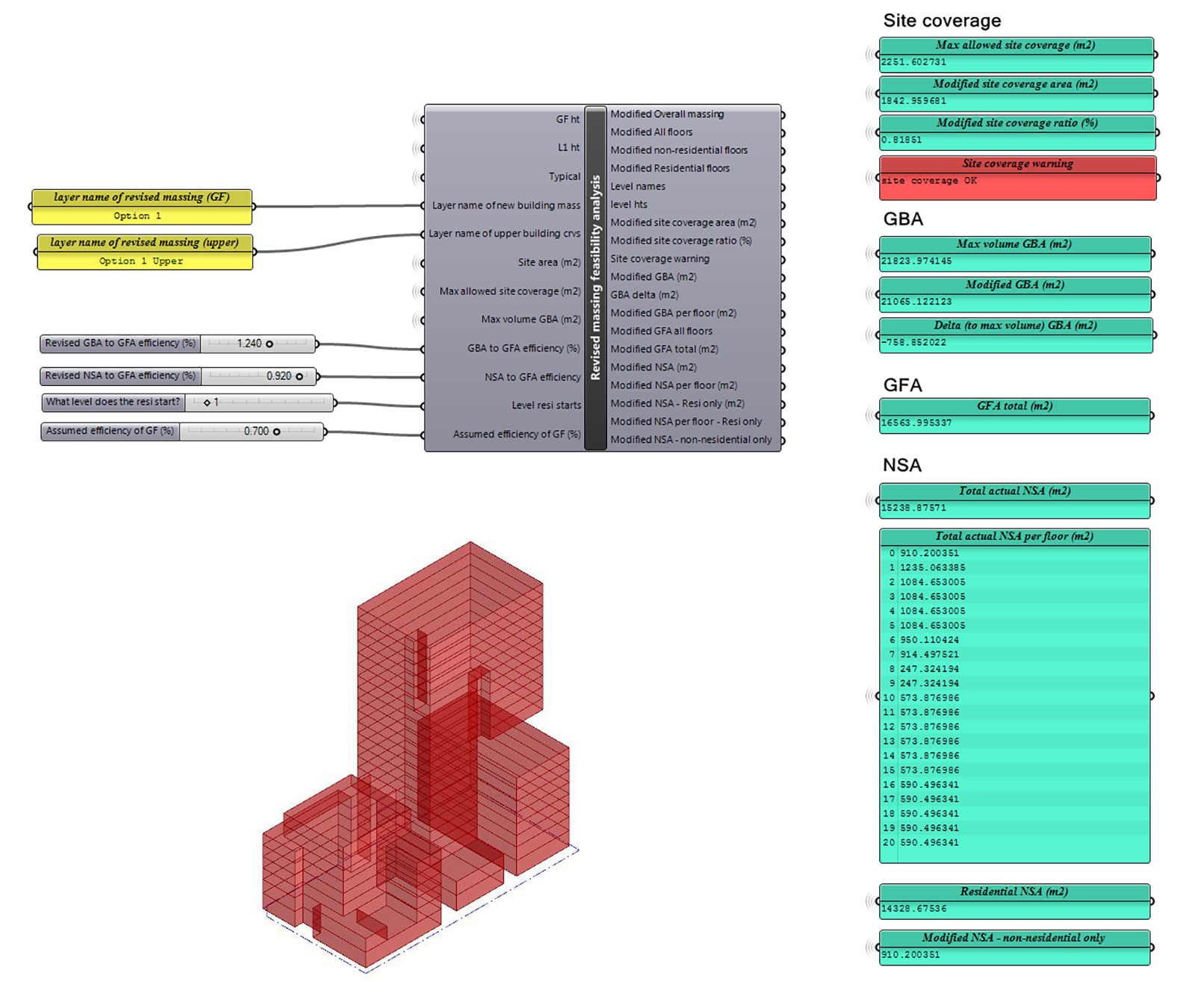
In order for the architect to know how much scope they have to modify the massing, the maximum building volume is evaluated. A series of efficiency assumptions is made based on historical data. Various outputs are returned relating to: site coverage; GBA; GFA; and, NSA. Using these outputs as a guide, it is possible to determine whether the maximum building massing is capable of achieving the brief requirements. This has enormous benefits to both the client and architect as designs can be tested extremely quickly before focusing on one particular scheme for further development.
Solar Access
Across the globe, governments have introduced various environmental performance legislation relating to new buildings. Mostly, this legislation relates to thermal performance. One of the peculiarities of working in the Australian state of New South Wales (NSW) is that in addition to these requirements, specific standards for solar access are prescribed for all residential buildings. Known as the State Environmental Planning Policy 65 (SEPP65), the policy aims to improve the amenity of residential apartment buildings.
While this legislation is very location specific, similar legislation exists in other parts of the world, such as the UK’s ‘Right to Light’ and New York’s 1916 Zoning Resolution. This legislation has a significant impact on the shape of the built form. The SEPP65 clause that influences building design the most is the requirement for 70% of living rooms and private balconies to receive a minimum of three hours of direct sunlight between 9am and 3pm in mid-winter. In order for this to be calculated, it is essential to know not only where apartments are located, but also their layout. This can be difficult to calculate at the feasibility stage of a project as a design is not yet fully understood. Thus, to simplify the computational process, the problem is split into two smaller discrete tasks.
A coarse-grain approach is first undertaken whereby the building massing is analyzed to determine the extent of external envelope that complies. By utilizing ladybug, an environmental plug-in for Grasshopper, the number of hours of direct sunlight the building massing receives can be determined. Depending on the results, the massing can be iteratively modified to achieve a building mass more conducive to solar access. A fine-grain approach is undertaken later to verify that the internal planning doesn’t contradict the coarse-grain solar access results.

Apartment taxonomy
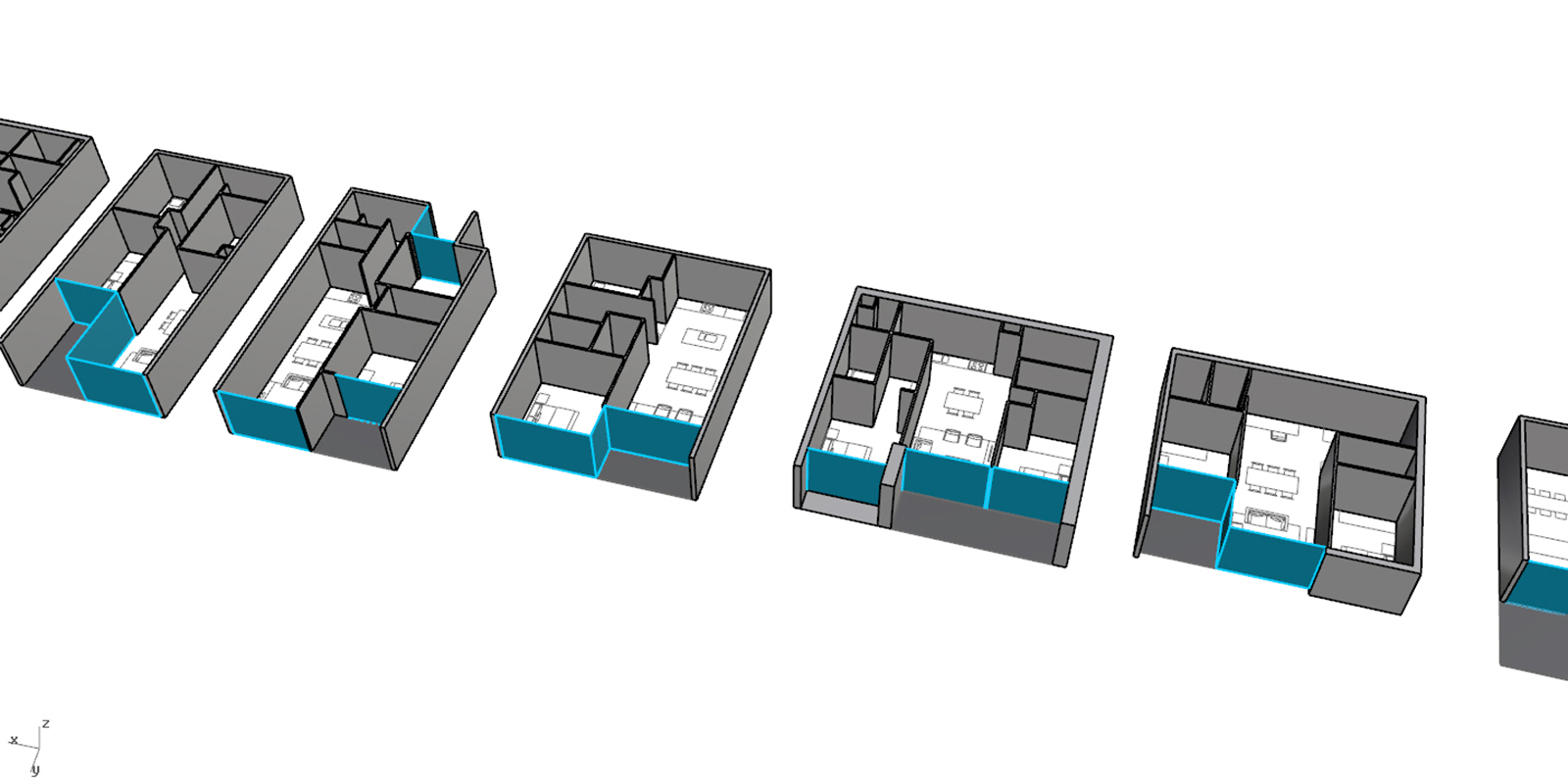
The script then looks at the morphogenetic constraints, starting with an apartment taxonomy. Over time, apartment layouts in multi-dwelling housing have emerged into a very clear typology. The requirements for natural ventilation, cross ventilation, stacking of service risers, minimum balcony dimensions, and maximum building depth from façade can be clearly seen in residential buildings. This can often result in ‘cookie-cutter’ building.

Rather than trying to re-invent apartment layouts, a selection of pre-defined apartments are chosen as the starting point. These apartments are evaluated based on various criteria, including: SEPP65 compliance, single or double aspect; accessible; etc. This is where the results of the fine-grain solar access analysis is undertaken to ensure that both the living room and balcony are compliant. Since the orientation of the apartment is not yet know, preliminary results can be ascertained and embedded into the Rhino apartment block using Elefront, which acts as an architectural DNA encoding.
Apartment combination generator
The next step is to deploy these apartments within the building massing. There are several possible methods in which to do this. One possible solution is to use an agent based system. However, such systems have certain limitations in order to be effective. For example, agents require significant open space, otherwise, it is impossible for local interactions to occur and hence, global patterns to emerge. This suggests that using agents on small or compact sites is not suitable for multi-dwelling residential building where site and building boundaries are often very controlled and confined. Therefore, the script evaluates the problem mathematically. By harnessing the power of the Brute Force component within the TT Toolbox plug-in, the script is able to solve all possible combinations of sliders that are connected to the input.
Four sliders are established which represent the number of apartment per floor for that particular apartment type. These parameters are known as the ‘genomes’. Assuming there will be a maximum of 10 apartment types per floor, the slider can be set to have a minimum value of 0, and a maximum value of 10. There are therefore 11 possible states of this genome. Since there are four sliders, one for each apartment type, this equates to the following possible outcomes:
11∧4 = 14,641
As the brute force component runs, the script records the genome mix. This list is then exported to Excel to prevent re-running of the script each time it is opened. The spreadsheet is then populated with formulas to calculate the total area each genome mix would produce in terms of NSA. This area value is used later to determine if that genome mix is suitable. One of the limitations of this methodology is that it is focused on high-rise residential buildings. For long, low-rise buildings, there might be significantly more than 10 apartment types per floor. This would prolong the computation time, possibly rendering it unviable.


Apartment mix matrix
A simple calculation then takes the NSA generated from the massing, and combined with the apartment mix ratio and average area per apartment type, generates the target number of apartments. It is important to note that when calculating these figures, the ratios are based on the total number of apartments, not the total NSA. Therefore the formula is:


Preferred apartment mix
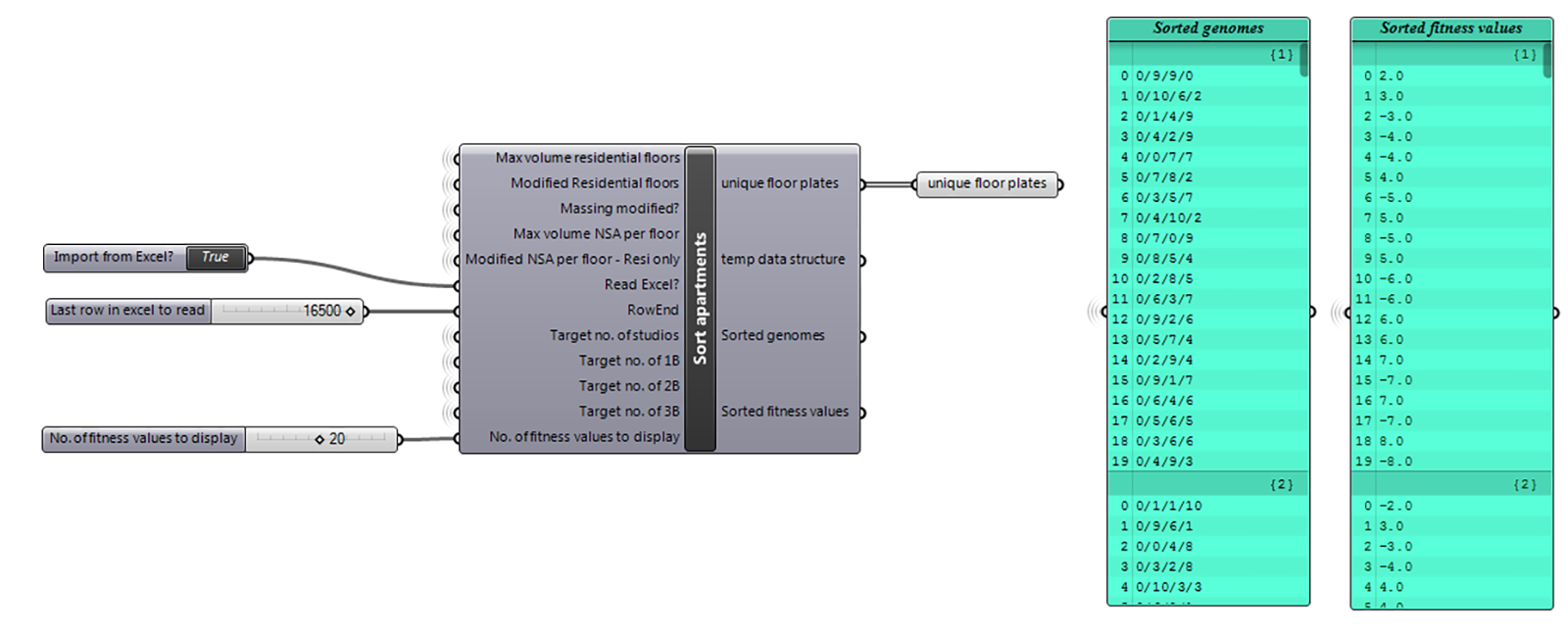
Once all possible permutations are known and how many apartments are required, it is possible to filter out configurations that are less desirable. By importing from Excel the total NSA per floor for each genome mix, a comparison can be made between the genome mix NSA and the actual NSA required. The delta between these two values is used as the fitness value. For example, the NSA for Level 1 is 1,235m². Using the Excel spreadsheet, it is possible to import all possible genome mixes. In this case, the top 20 results are returned. The top genome mix is 0/9/9/0, which represents:
- 0 no. Studios
- 9 no. 1 beds
- 9 no. 2 beds
- 0 no. 3 beds
Since 1 bed apartments are defined as 55m2 and 2 bed apartments are defined as 82m2, this equals:
(9*55 m²) + (9*82 m²) = 1,233 m²
With this genome mix, it is only 2m² off the target of 1,235m² NSA for that floor. Since some floor plates are repeated, the script only calculates the unique floors to save computational time.
Apartment mix distribution
The previous step evaluated apartment mixes on a level by level basis, based on NSA. However, other parameters must also be addressed, such as overall apartment mix. In order to do this, every level must be taken into consideration. Since there are 20 stories in this building with 20 possible apartment mixes per floor, this would equate to 100 quintillion possible solutions if the brute force methodology is adopted. This is obviously not viable due to the time it would take to compute all possibilities. The script therefore utilizes Galapagos which is an evolutionary solver within Grasshopper.
A simple way of taking a holistic approach to apartment distribution is to calculate the delta number of apartments compared to the brief requirements. By mixing and matching one of the top 20 genome/apartment mixes per floor, it should be possible to get close to the brief’s requirements. Fitness, therefore, can be defined by the delta number of total apartments compared to the brief. However, this is not always adequate. For example, in certain situations such as a tower, stacking of apartment layouts is desirable. In this scenario, limiting the variations in apartment distribution might be desirable. To cater for this, the script ‘penalizes’ an overall arrangement based on the number of different mixes it has, essentially ensuring that an apartment mix is repeated throughout the tier/building.
By adjusting the various penalty inputs, the user is able to priorities and customize the fitness criteria. This is an immensely powerful tool, as it is able to synthesis many conflicting requirements, into a single fitness value. The final result is a mathematically tested feasibility study that can be used as the basis to generate form.

Future development
One of the limitations of the current research is that no apartment geometry is actually generated. It is hoped that with further development, the script will eventually be able to automate the placement of apartments based on the apartment mix distribution results and the apartment DNA. This should ensure that apartment layouts don’t contradict the SEPP65 requirements.
Furthermore, it is suggested that the greatest strength in this tool is the ability to financially model prospective designs. Rather than defining the fitness of a scheme based on area and apartments, which ultimately are secondary concerns to the client, it is possible to define fitness in terms of revenue. Certain apartments will achieve a different $/m2 value depending on its orientation, size, location, etc. To experienced developers, this data is already readily available. By exposing this financial data, a more performative building can emerge that negotiates all requirements from the architect, client and planning authorities.





2 Comments
Richard James Keeling
This looks really good, it would be nice to see a video demo of some kind?
Paul Wintour
Hi Richard. I did have some videos uploaded a long time ago but the only one left is this one: